从零学习 ROS2、实机部署踩坑、到提出结构感知驱动算法——记录我把一个自主建图研究从想法推到论文和发明专利的完整过程
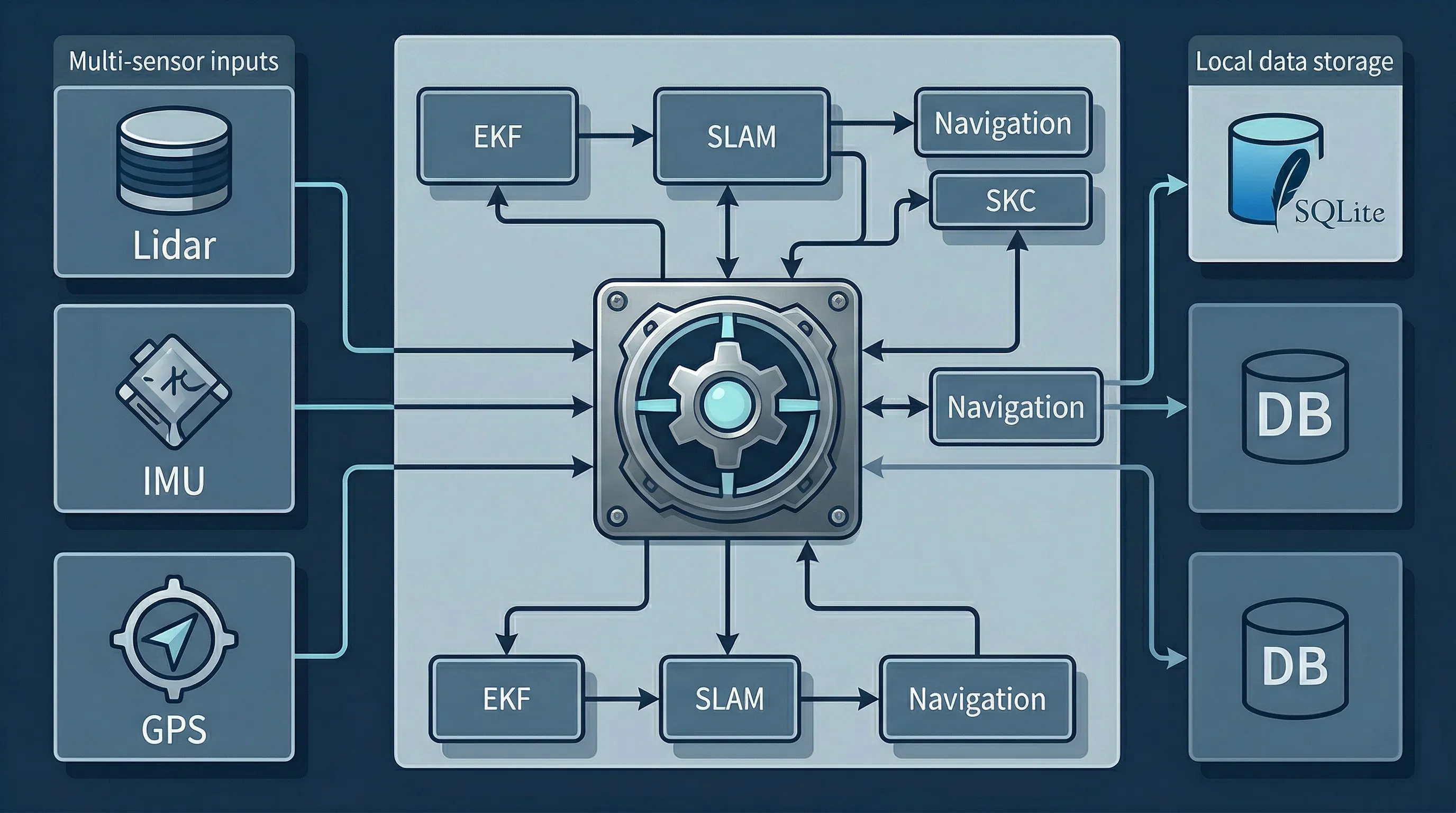
校企合作横向项目,负责ROS2系统架构设计与节点模块化拆分,解决企业定位系统架构混乱、通信不稳定等问题